Autonomous In-Situ Soil Sampling Using a Ground-Based Robotic System
[ Watch Movie ]
An adaptive sampling alrogithm to find the next best sampling location, and a system integration framework that enables the robotic platform to collect and analyze soil samples efficiently in unknown environments.

A robot when released into an environment should autonomously generate a contaminant distribution of the unknown environment
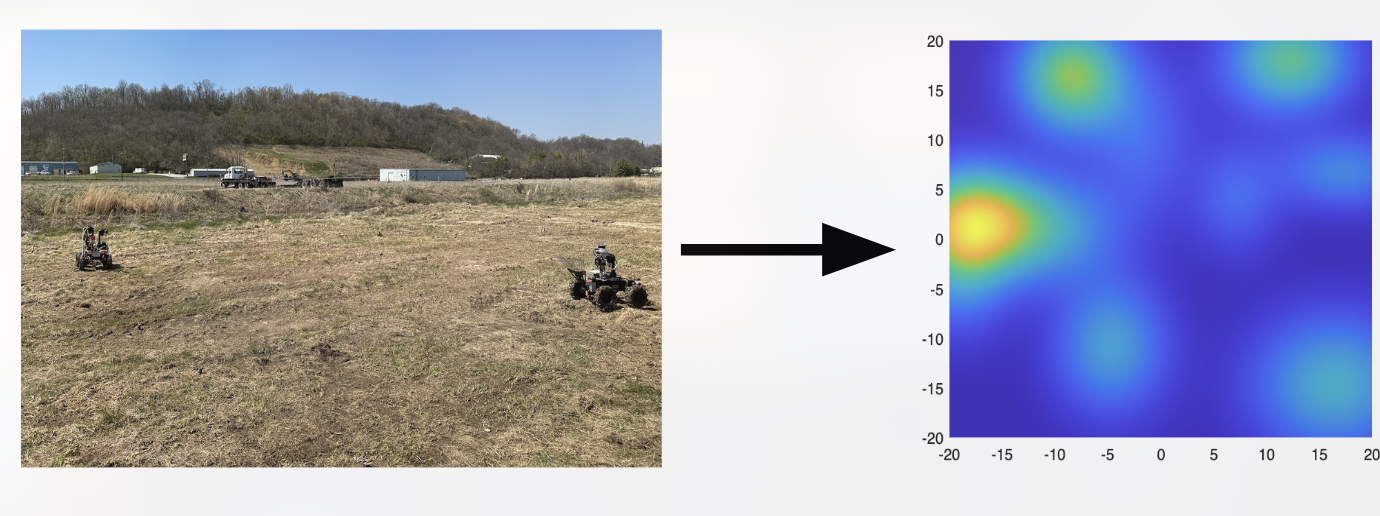

The
Portable X-ray Fluorescence (PXRF)
sensor provides the concentration of elements in a sample, heavier than chlorine in the periodic table. It needs to have close contact with the sample and each sensor reading is expensive. Each reading takes around 45 secs to complete, and is highly local and precise. This is in contrast to other class of sensors like a camera or a lidar, that gives you a lot of information in a fraction of a second over a large spatial region.
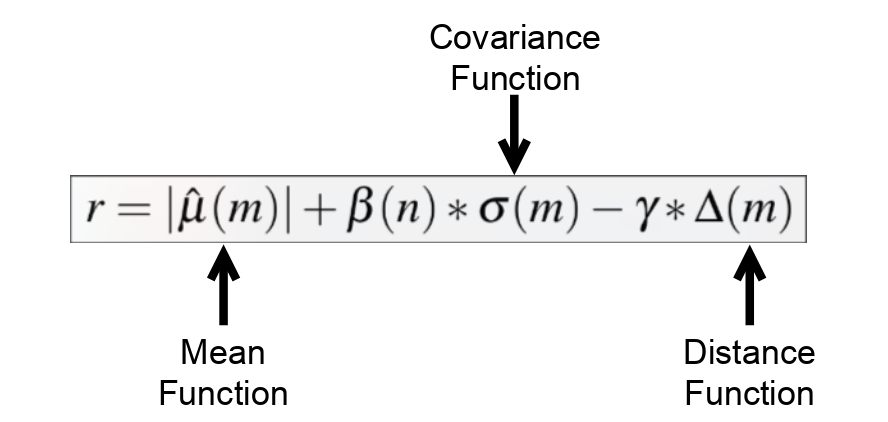
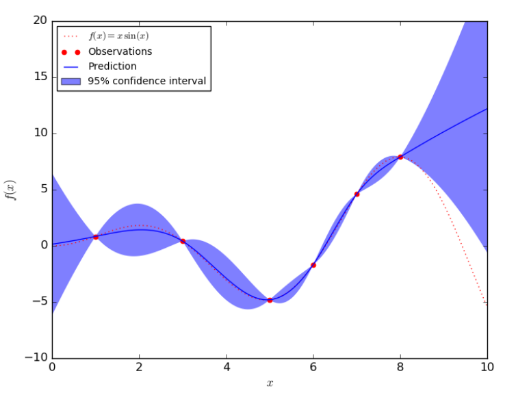
The
Adaptive Sampling
algorithm uses Gaussian Processes to model the contaminant distribution. The next location to sample is selected based on a reward function:
Simulation and Metrics
A simulator was developed to aid in the design and comparison of adaptive algorithms within a controlled simulation environment. The Earth Mover's Distance (EMD) was to quantify the error between the predicted and actual distributions. It measures the dissimilarity between two distributions by quantifying the "amount of work" needed to transform one distribution into the other.
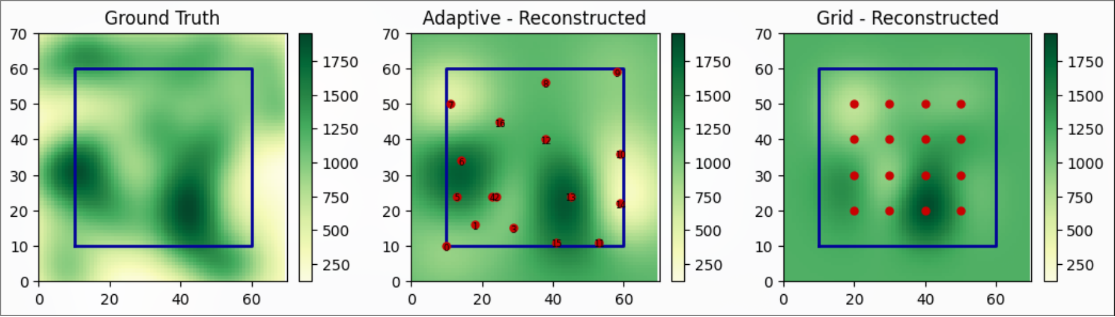
In the image above, the adaptive sampling algorithm (0.0368) has a lower EMD value than that of grid Sampling (0.0972).
Patrick in a field
